Project Photo Gallery
Advanced EMG-Controlled Prosthetic Hand
Real-time EMG-controlled bionic hand with <2-minute training time and $121 cost. Features analog filtering (20-500 Hz), KNN classifier, and multi-servo tendon actuation for responsive prosthetic control.
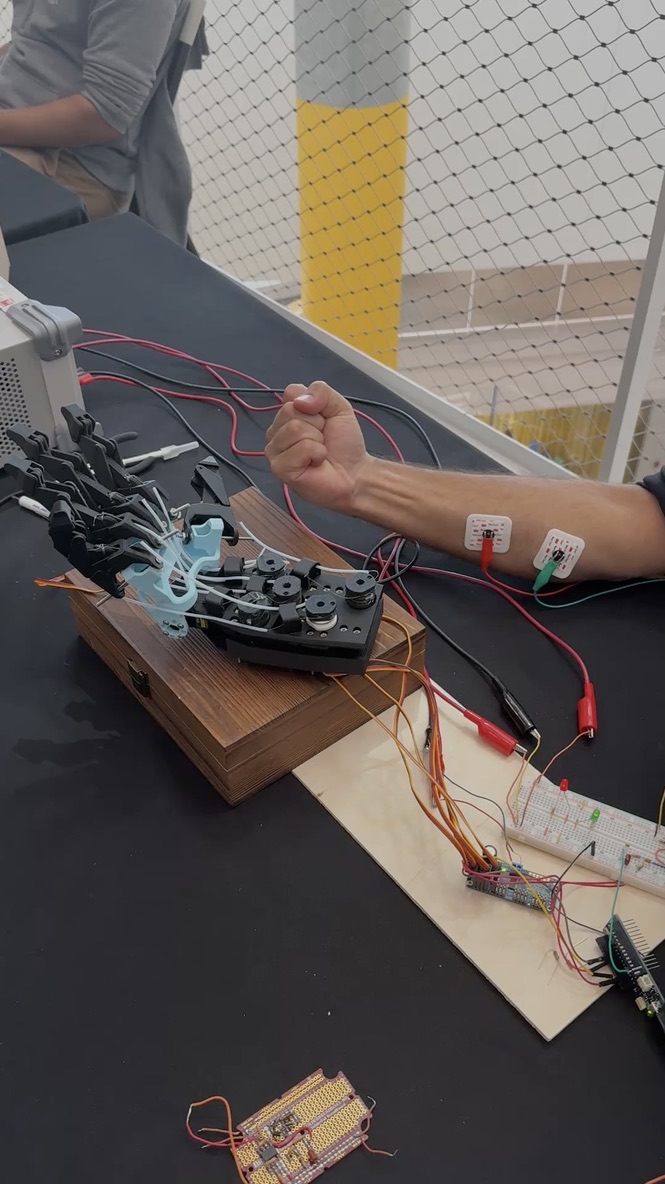
Live demonstration of EMG signal processing and real-time bionic hand control using muscle activation patterns.
Comprehensive final project report for Harvard Engineering Sciences 50 documenting the complete design, implementation, and testing of our myoelectric bionic arm. Includes circuit design, EMG signal processing, machine learning classification, and mechanical assembly details.
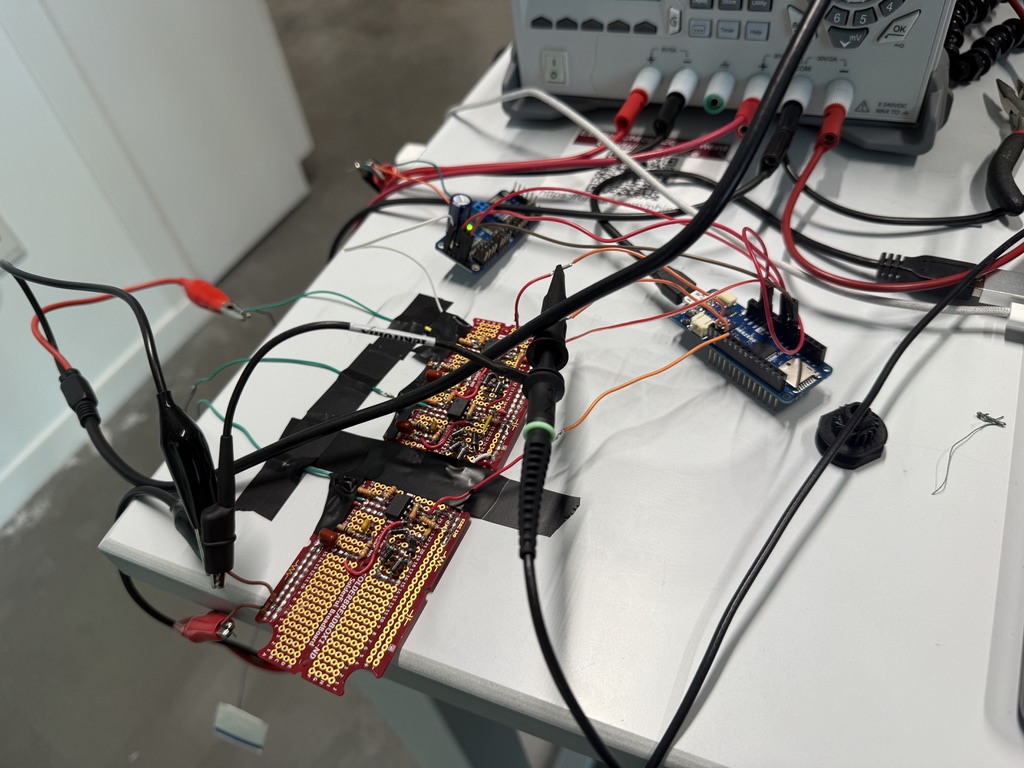
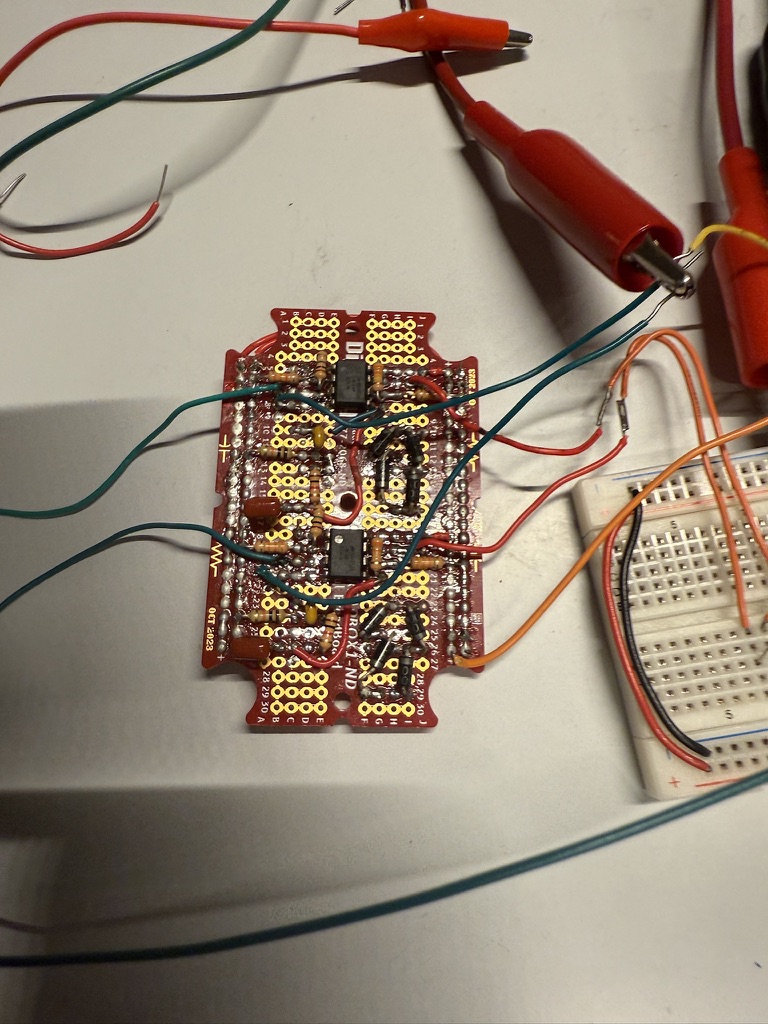
The circuit design centers on advanced EMG signal acquisition and processing, utilizing specialized amplification circuits to capture muscle electrical activity with high fidelity. The system employs custom circuit preprocessing to filter and amplify EMG signals before digital conversion, ensuring clean signal input for our machine learning algorithms. The complete hardware implementation costs $121.26, demonstrating that sophisticated myoelectric control can be achieved through cost-effective component selection and efficient circuit design.
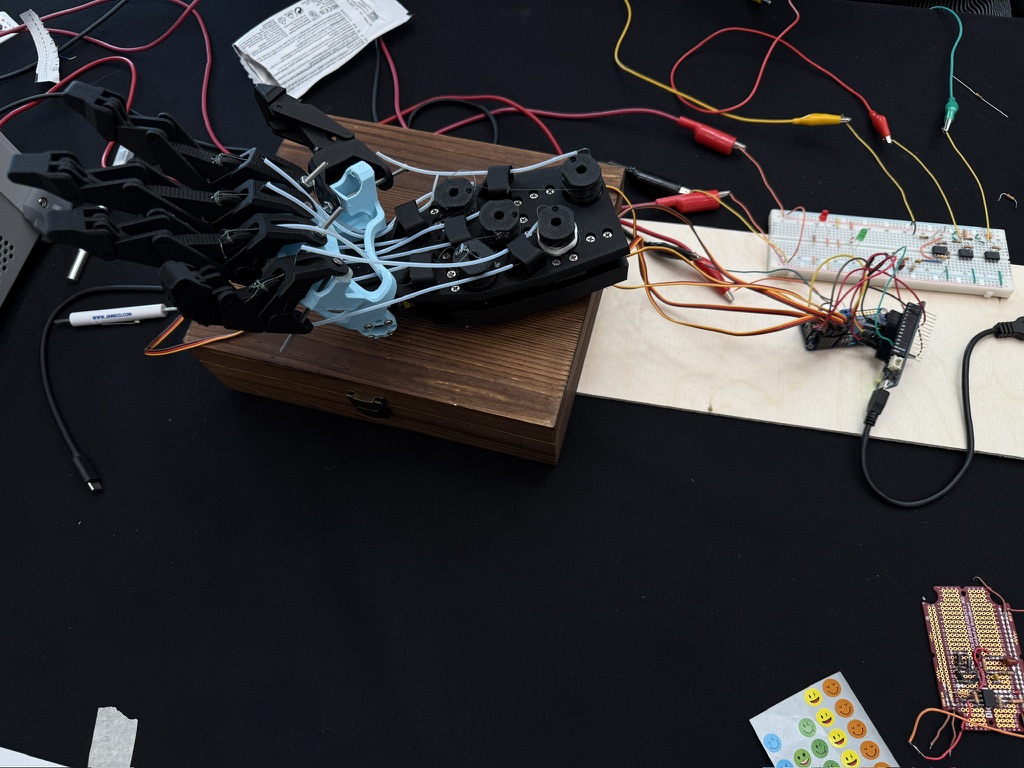
The prosthetic hand design incorporates servo-controlled finger mechanisms capable of binary classification for open and close gestures. Our kNN algorithm implementation in C++ processes EMG signals in real-time, enabling sub-minute training periods that allow users to quickly calibrate the system to their specific muscle patterns. The algorithm analyzes muscle contraction patterns and translates them into precise hand movements, creating an intuitive control interface that responds immediately to user intent.
Leading the research team of Finn Seyffer, Xavier Ayala-Vermont, and Anthony Bynum, I was responsible for conceptual planning, circuit assembly, EMG amplification design, and the binary classification implementation. The system achieves reliable real-time EMG processing through optimized signal processing pipelines and efficient algorithm execution. This research demonstrates how advanced biomedical engineering principles can be applied to create functional myoelectric prosthetics that bridge the gap between biological signals and mechanical control systems.