Research Gallery



PRISE Fellowship Research Project
Developed and open-sourced a High Precision, Low-Turbulence Vertical Wind Tunnel for microrobotic insect flight testing. Achieved 44% turbulence reduction with a compact, cost-effective system designed for replication by microrobotics labs worldwide, including MIT and Berkeley.
Sub-$150
Complete system cost including all components
Sub-600mm
Total height for easy lab integration
< 2 days
Rapid fabrication and assembly
0.2–2.5 m/s
±0.02 m/s setpoint resolution
44%
Compared to existing solutions
Re ≈ 50–100
Steady laminar flow regime
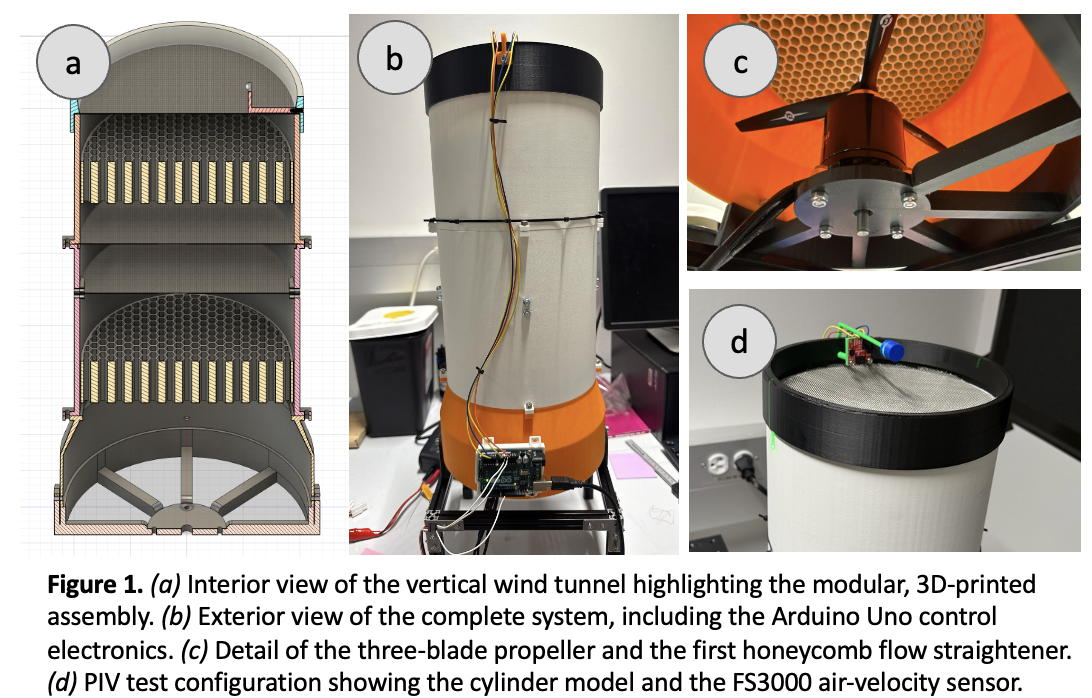
Vertical wind tunnels enable controlled studies of gliding, flapping, maneuvering, and stability in both biological insects and microrobots, where aerodynamic forces are small and flows are typically laminar. Existing tunnels are often large, expensive, and tuned for higher Reynolds numbers, making them ill-suited to micro-scale regimes (Re < 2300). Our objective was to create a compact, low-cost, open-source vertical wind tunnel that reliably delivers uniform, low-turbulence flow within micro-scale Reynolds numbers.
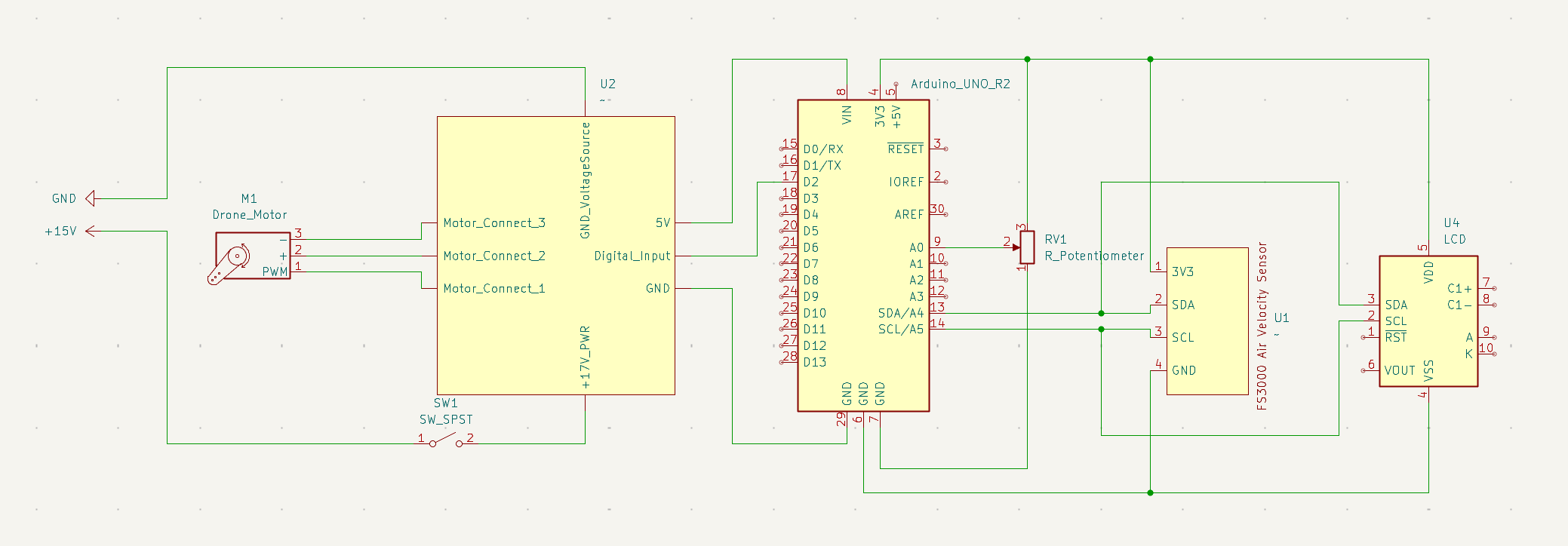
The mechanical design utilized Fusion 360 Computer Aided Design and was fabricated as a modular FDM 3D-printed system. Our flow conditioning stack includes two contraction nozzles to minimize wall/tip effects, two honeycomb stages (64mm and 40mm tall), and four 34-mesh screens at tuned axial positions to suppress large-scale turbulence and equalize velocity profile. The drive system features a 335 KV brushless motor with 8×6 three-blade propeller, controlled via ESC with Arduino-based PID loop using an FS3000 air-velocity sensor for closed velocity feedback.
Computer vision analysis was performed using Python, OpenCV, and OpenPIV to analyze wind particle flow and assess spatial uniformity. Particle Image Velocimetry (PIV) on laser-illuminated, glycerol-seeded images quantified velocity fields around test cylinders. Our results demonstrated steady laminar flow with classic laminar separated wake characteristics: uniform upstream flow, smooth diversion around cylinders, steady mirror-symmetric recirculation bubbles, no vortex shedding, and clean flow reattachment. The system provides precision control with closed-loop velocity regulation and ±0.02 m/s setpoint resolution across the full operational range.
Complete technical documentation of the Low-Turbulence Vertical Wind Tunnel project, including methodology, results, and validation studies. This poster presents the full research findings from the Harvard PRISE Fellowship program.